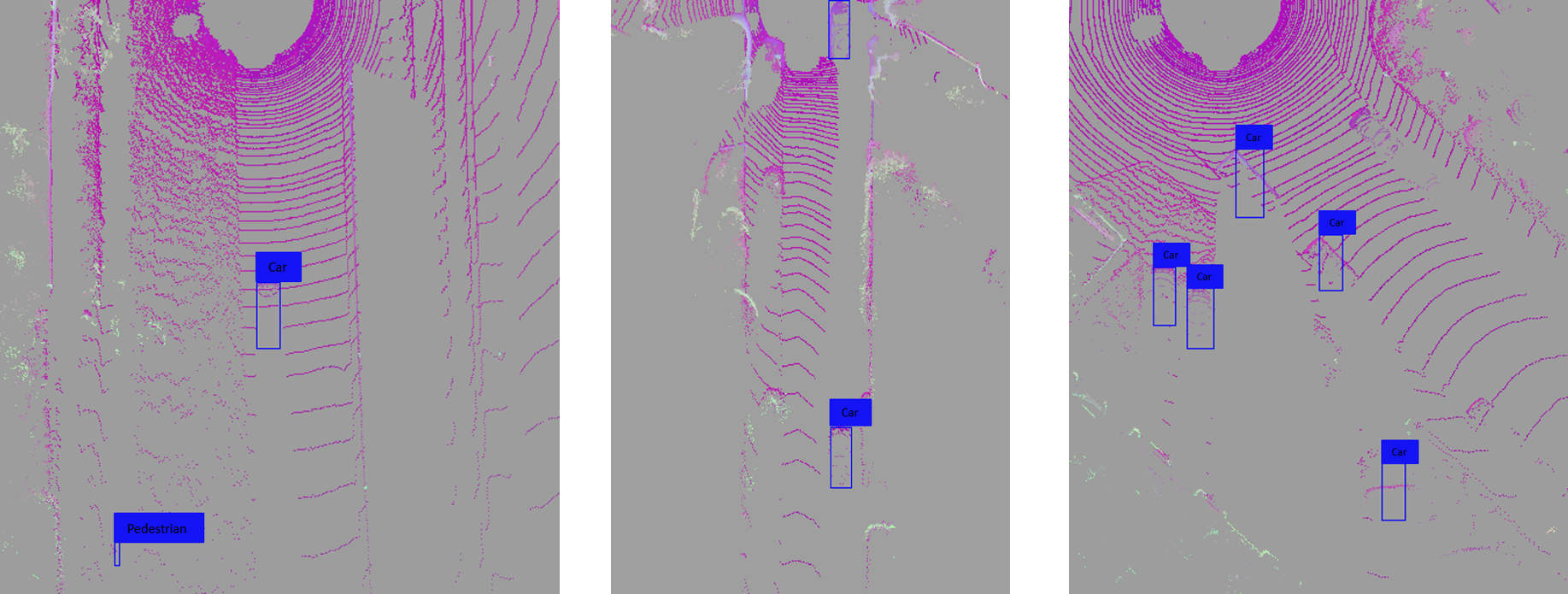
Results on performing object detection on the KITTI dataset when the 3D point cloud data is converted to a 2D birds eye view
and fed as input to the Complex YOLO architecture. Some bounding boxes are not oriented properly over the cars
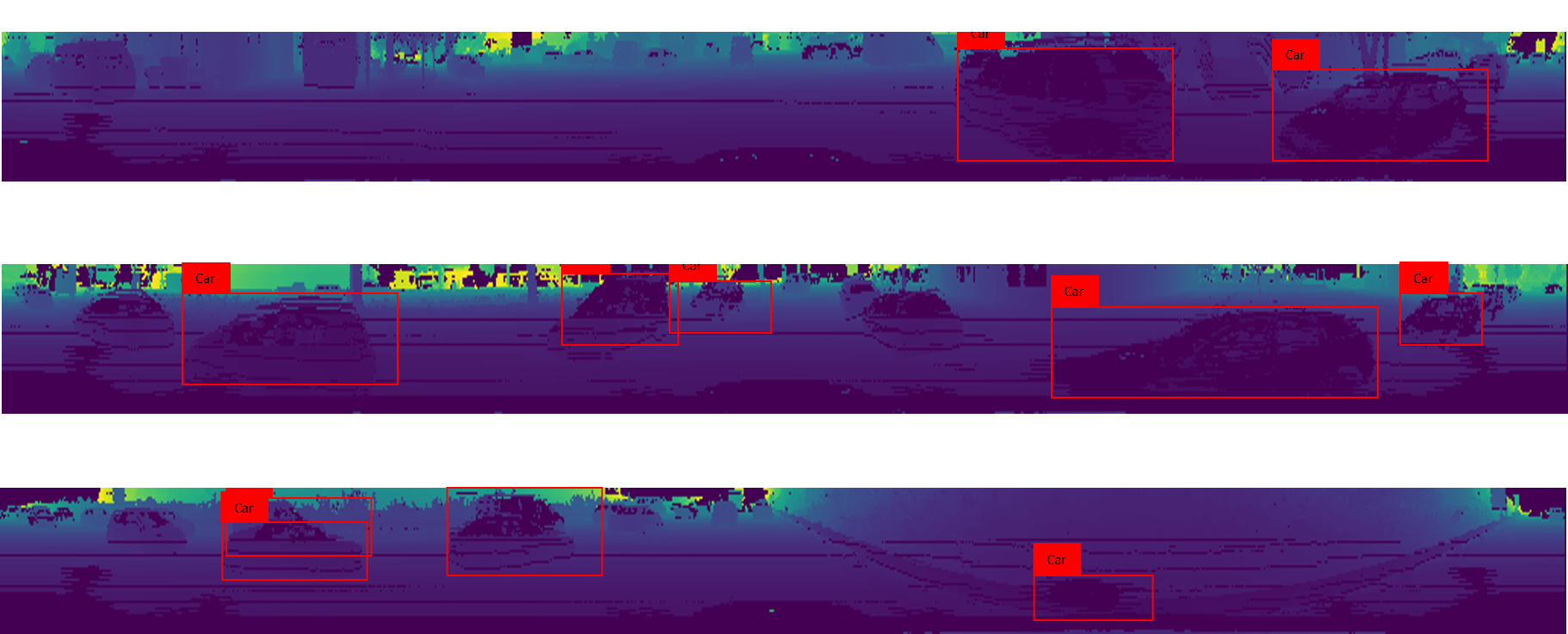
Results on performing object detection on the KITTI dataset when the 3D point cloud data is converted to a 2D panaroma view
and fed as input to the Complex YOLO architecture. Numerouisr cars, pedestrians are left undetected by the network


-
- Results on performing object detection on the KITTI dataset when the 3D point cloud data is converted to a 2D panaroma view and fed as input to the Complex YOLO architecture. Numerouisr cars, pedestrians are left undetected by the network
-
- Results on performing object detection on the KITTI dataset when the 3D point cloud data is converted to a 2D birds eye view and fed as input to the Complex YOLO architecture. Some bounding boxes are not oriented properly over the cars
-

- The modified 2D LIDAR
-
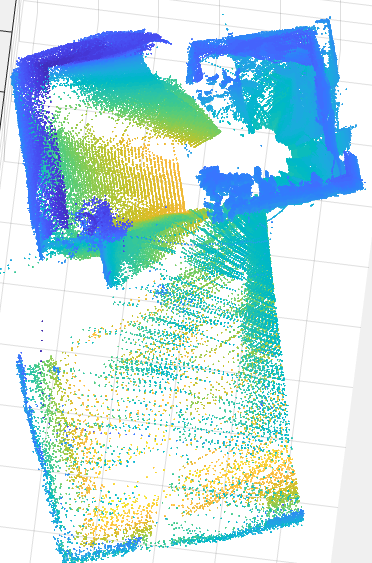
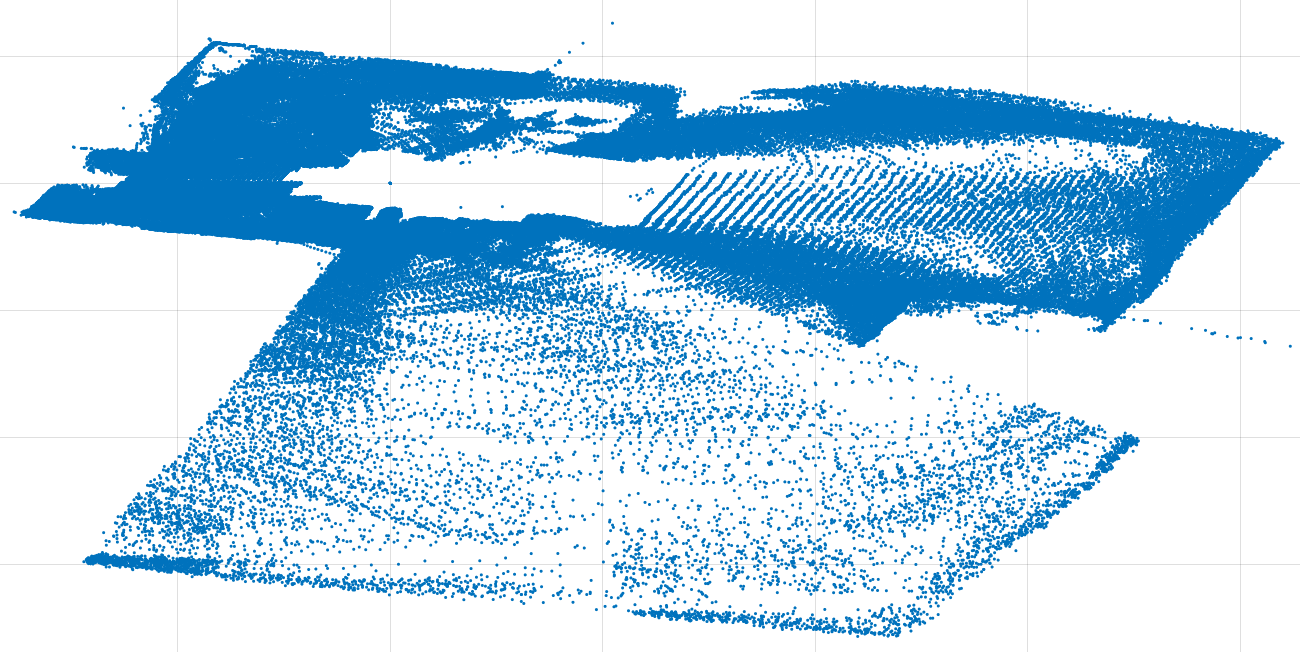
- Sample point cloud data of an indoor environment collected from the 2D LIDAR